Stefan Schulz.
Download CVI am a first-year PhD candidate at the University of Bonn, supervised by Prof. Matthias Hullin specializing in "Differentiable Scene Representation for 4D/6D Capture, Reconstruction and Synthesis". My work aims to create scalable, high-fidelity real-time algorithms for real-world 3D content acquisition and generation with application in AR/VR as well as search and rescue ops.
Outside work, you can find me on hiking trails and pursuing (mostly) landscape photography or reading a sci-fi novel.
/ research interests
Computer Graphics
High-fidelity neural rendering, relighting, and physically-based material modeling for realistic synthesis.
Computer Vision
Real-time 3D reconstruction, geometry estimation, view synthesis, and (generative) scene editing.
Capture Stages
Multi-view capture, lighting, (generative) video editing, and digital twin/avatar creation.
/ featured publications
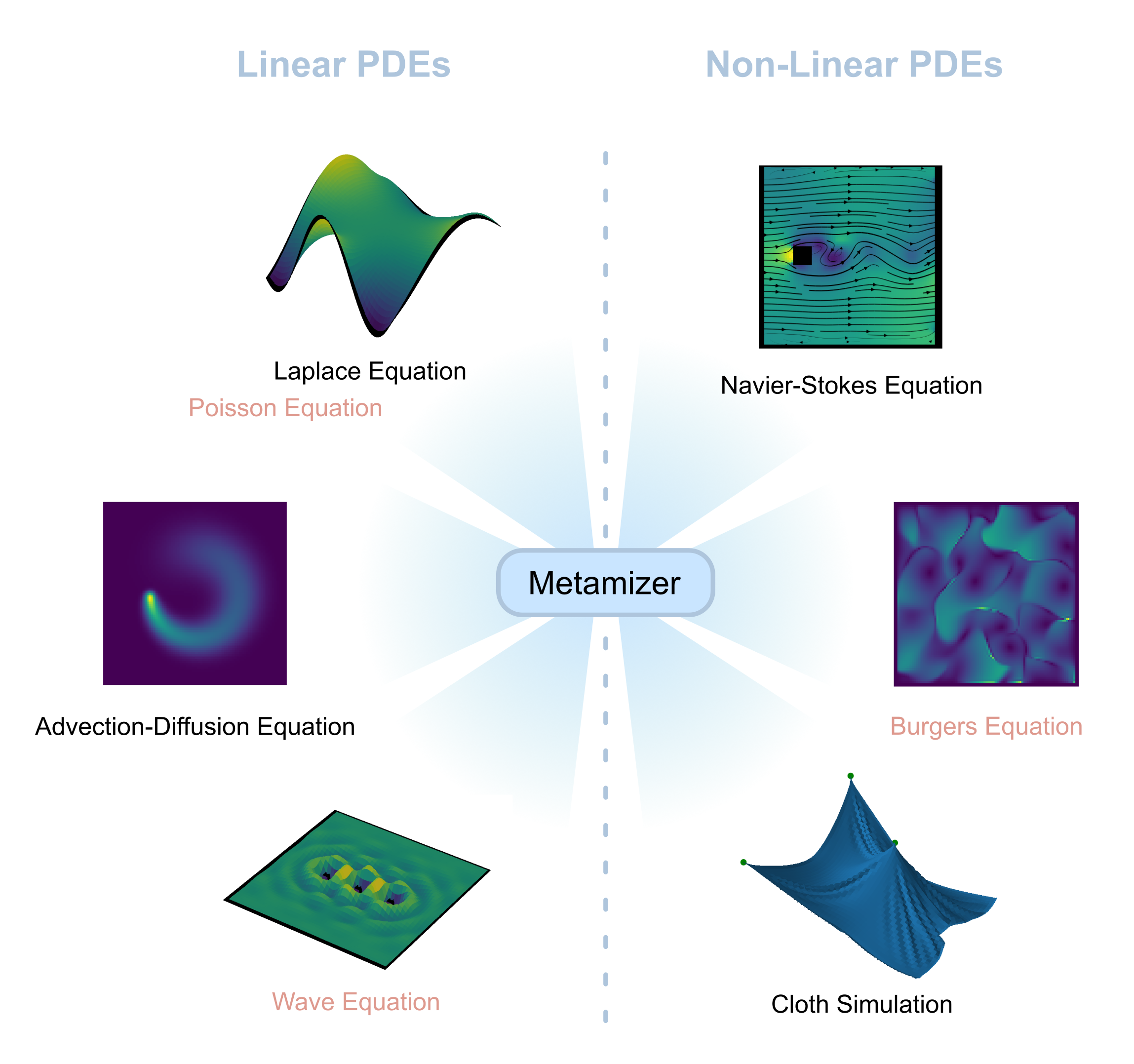
Metamizer: a Versatile Neural Optimizer for Fast and Accurate Physics Simulations
Efficient physics simulations are essential for numerous applciations, ranging from cloth animations in video games to calculating drag coefficients in engineering applications. However, obtaining analytical solutions to underlying physical equations is rarely an option or possible. Thus, we introduce Metamizer, a novel optimizer that iteratively solves a variety of physical systems without retraining.
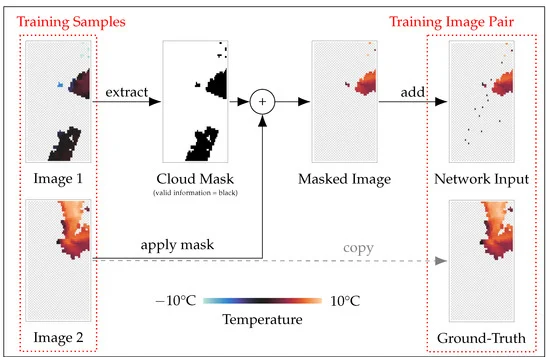
Deep Interpolation of Remote Sensing Land Surface Temperature Data with Partial Convolutions
Although a range of satellites exist that produce freely available daa for crop production estimations based on different climate data, it is difficult to get reliable land surface temperature estimates due to cloud occlusions. Therefore, we propose combining this data with ground-site weather station data and using partial convolutions for temporal interpolation and extrapolation.

RoboCup 2022 AdultSize Winner NimbRo: Upgraded Perception, Capture Steps Gait and Phase-Based In-Walk Kicks
In this paper we present the updates performed on our robots compared to recent years that led us to winning the RoboCup 2022 in Bangkok, Thailand. Our perception module has been upgraded with new hardware and adjusted software as well as new kicking techniques that have been introduced for better efficiency in front of the goal.